

出願人 株式会社安川電機 の特許一覧 日本特許情報 発明ナビ
Www Toshiba Co Jp Tech Review 11 05 66 05pdf F04 Pdf
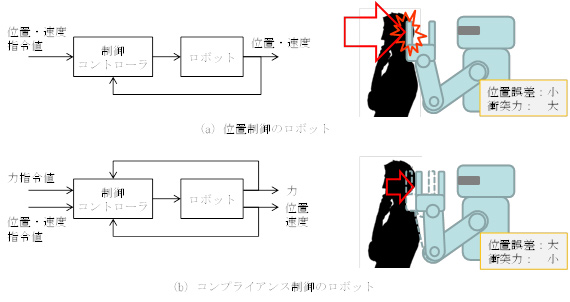
インピーダンス制御とコンプライアンス制御 Gggggraziegrazie
コンプライアンス 制御 のギャラリー
学位論文要旨詳細
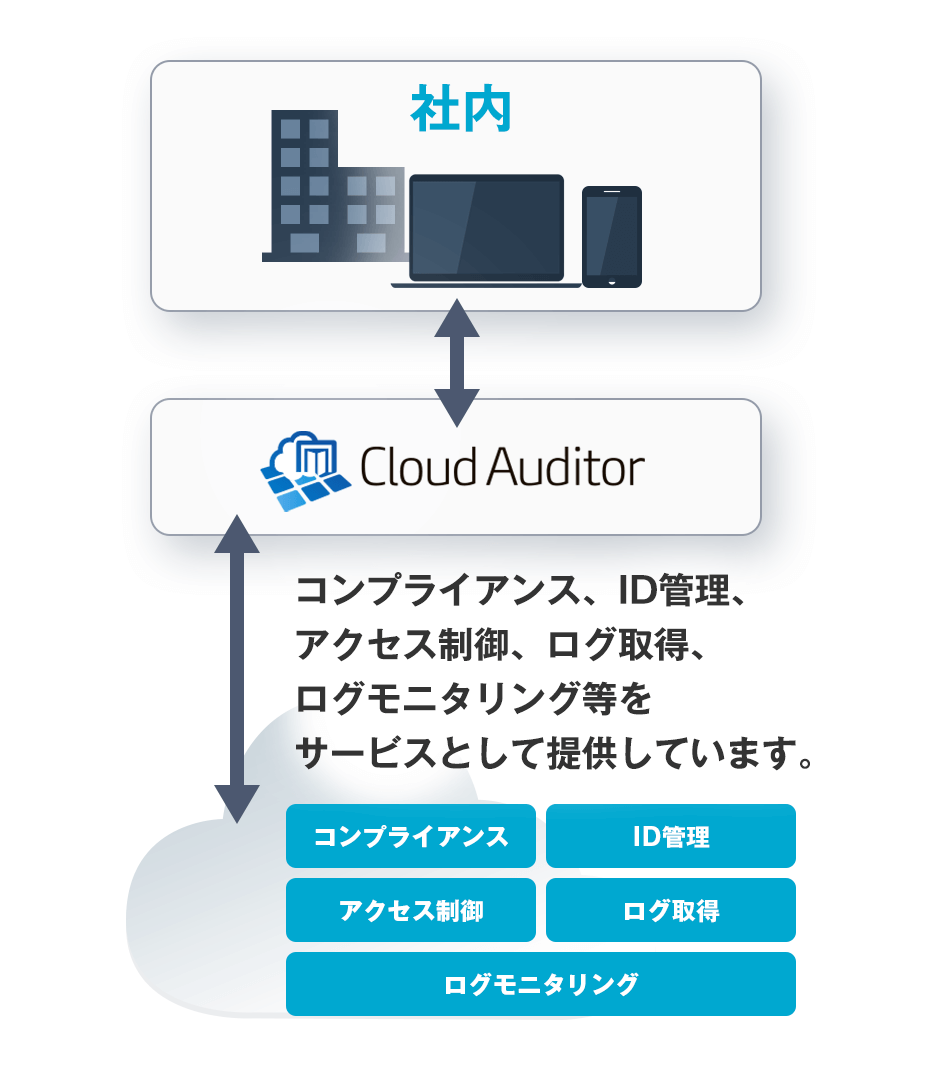
セキュリティとコンプライアンス Box

東京都市大学 Rls研究室 Dual Arm Robot Group
うんたらかんたら制御方式 Haraduka S Diary
Jfps 日本フルードパワーシステム学会
Asimo
コンプライアンス 住友共同電力

仮想コンプライアンス制御の意味 用法を知る Astamuse
Wl 16riii概要

産業用ロボット Melfa Sq Sdシリーズ 三菱電機 株 Mitsubishi デジアナeカタログ メカトロネット

アクセス制御管理 Omnicontact 株式会社アセンド

古河電池株式会社 コンプライアンスとリスクマネジメント ガバナンス サステナビリティ 古河電池株式会社

リスク コンプライアンス Kioxia
特表19 知財ポータル Ip Force
安全な協働ロボットのための壊れにくい力覚センサの開発 1 Sens Aitプロジェクト
Www Azbil Com Jp Corporate Pr Library Review Pdf 09 12 10 Pdf
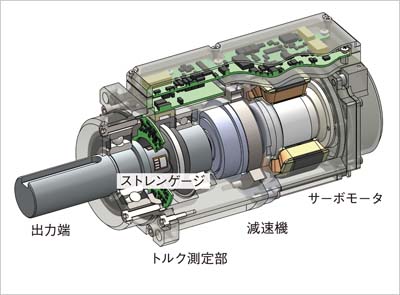
株式会社ロボテック 出力軸トルク測定機能付きサーボモータ ユニサーボ こだわり物語
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf
コンプライアンス 企業倫理とコンプライアンス ガバナンス 川崎重工業株式会社

799円でpcからフタバ製コマンド方式サーボを動かそう ぷらぎあ工房

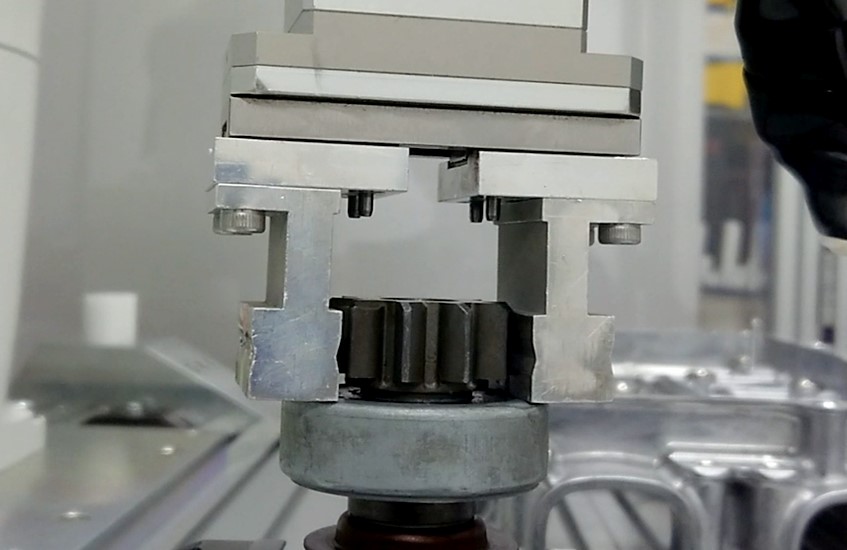
電動トルクアクチュエータ ゼロトルク制御 コンプライアンス制御 Youtube

B 図3 アクセス制御を抜けた先では 情報制御 を行う B 日経クロステック Xtech
Http Www Futaba Co Jp Img Uploads Files Robot Download Rs601cr 4 Pdf
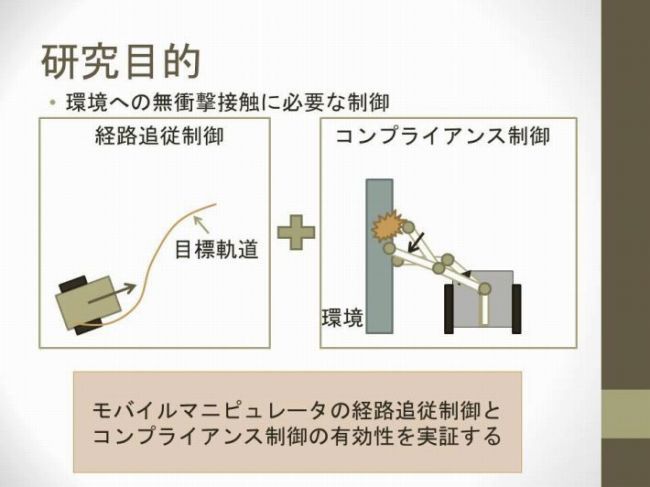
モバイルマニピュレータ 豊田工業大学 制御システム研究室
学位論文要旨詳細
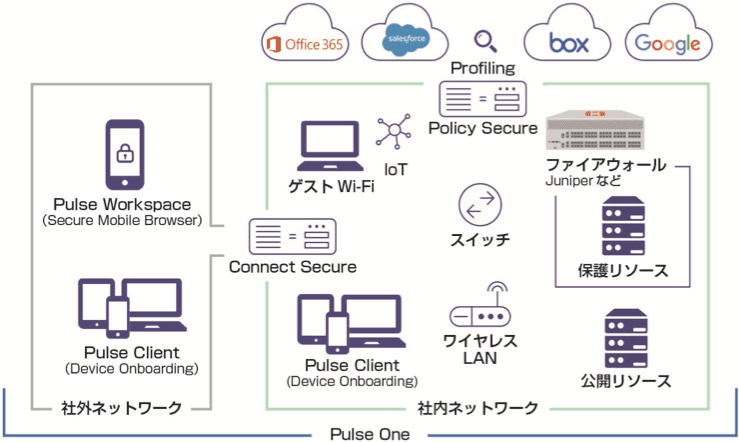
Pulse Secure パルスセキュア ジェイズ コミュニケーション

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御

Office 365 セキュリティとコンプライアンス
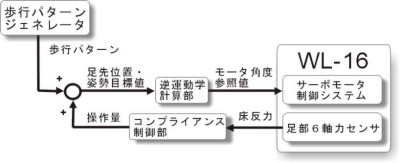
Wl 16 Waseda Leg No 16
Http Www Hondafoundation Jp Data Files View 300
Http Www Hondafoundation Jp Data Files View 300

Forescout 商品情報 Forescout Platform 産業用制御システム向けセキュリティ
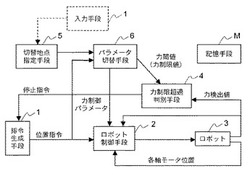
力制御装置

コンプライアンスレポート Safeguard For Privileged Sessions
Www Azbil Com Jp Corporate Pr Library Review Pdf 09 12 10 Pdf
コンプライアンス機能 ロボット機能 製品 産業用ロボット デンソーウェーブ
ロボットとアクチュエータのバックドライバビリティ ロボ學 Robogaku

1994 号 コンプライアンス制御装置 Astamuse

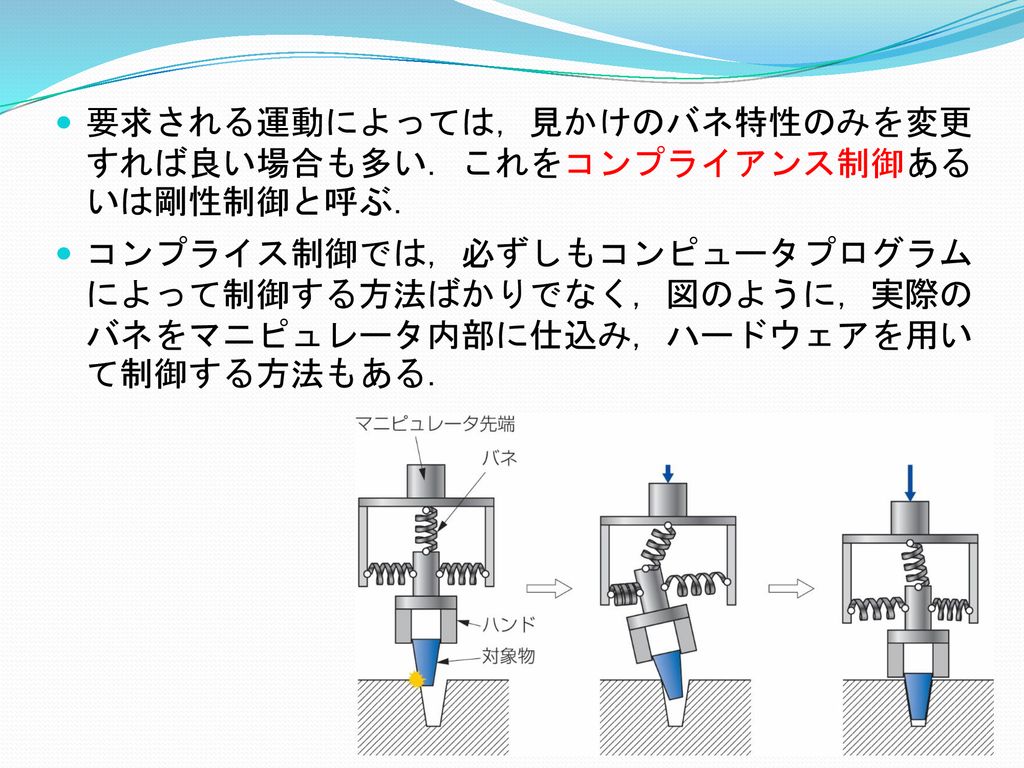
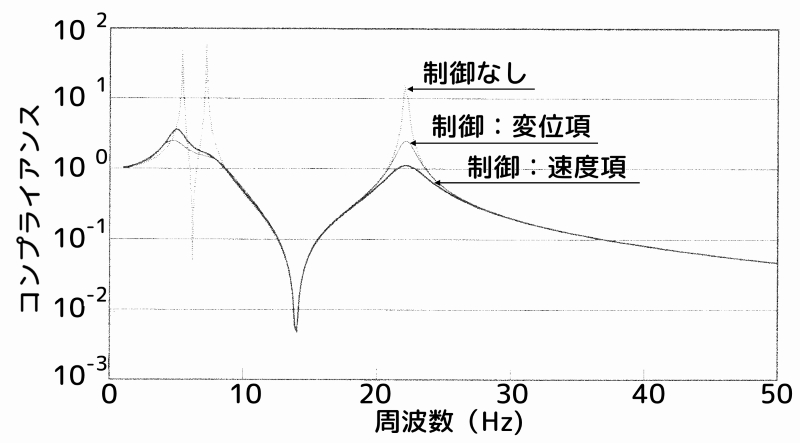
ロボット工学第2回資料

医療機器メーカーは 品質管理プロセスを制御することで革新的な製品をいち早く市場に投入できる Ptc
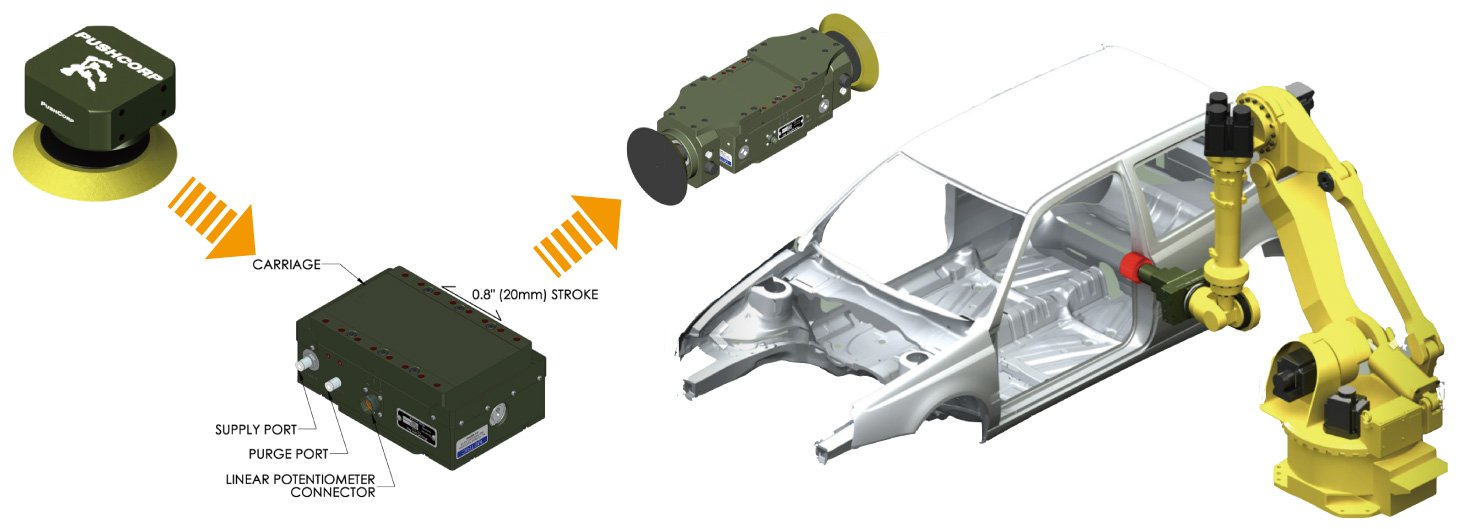
プッシュコープ社 ロボットアーム先端取付工具用アクティブ コンプライアンス コントローラ 愛知産業株式会社
ポリシーのコンプライアンス データを取得する Azure Policy Microsoft Docs
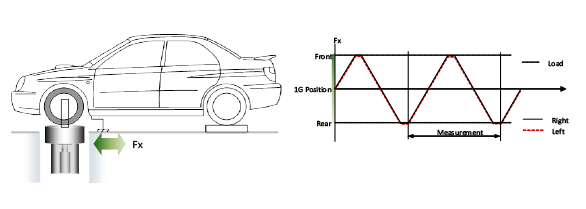
車両基礎特性測定装置 K Cテスター 受託試験 Automax

電流出力dacによる正確なトランスデューサ制御 Digikey

レオメータ制御システム

1998 0534号 サスペンションのコンプライアンス制御装置 Astamuse
インピーダンス制御とアドミッタンス制御 Gggggraziegrazie

Wo1709a1 外力追従制御システム Google Patents

Robotec
ロボット工学 第14回 インピーダンス制御 福岡工業大学 工学部 知能機械工学科 木野 仁 Ppt Download
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf
Lq最適制御による振動制御系設計入門 実験とシミュレーションとはかせ工房

Jpb2 セミ アクティブ トー力コンプライアンス制御機能を有するリヤサスペンション Google Patents
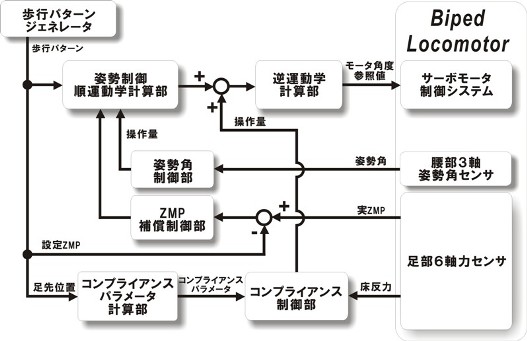
Wl 16 Waseda Leg No 16

デンソーウェーブはエクサウィザーズの Corevery を採用し マルチモーダルai技術による コンプライアンス制御 フロー生成 模倣動作学習 を実現 年7月から販売予定 株式会社エクサウィザーズ

1 インテリジェントmckibben型アクチュエータ

開放特許情報データベース 開放特許情報データベース

ガバナンス 株式会社オリジン
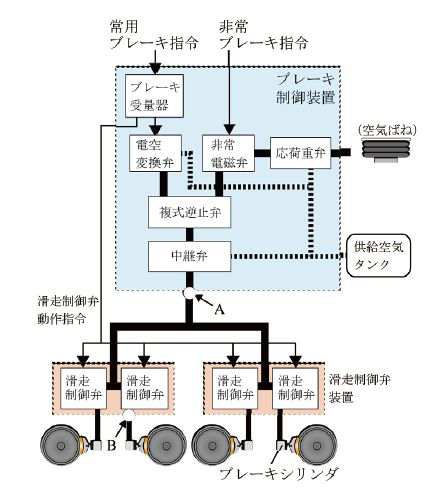
公益財団法人鉄道総合技術研究所 車両ニュースレター 16年4月号

オリジナル解説 Opc Uaとは 第4回 Opc Uaの活動 2 コンプライアンス オムロン制御機器
オリジナル解説 Opc Uaとは 第4回 Opc Uaの活動 2 コンプライアンス オムロン制御機器

電子情報開示調査のためにコンプライアンスの境界を設定する Microsoft 365 Compliance Microsoft Docs
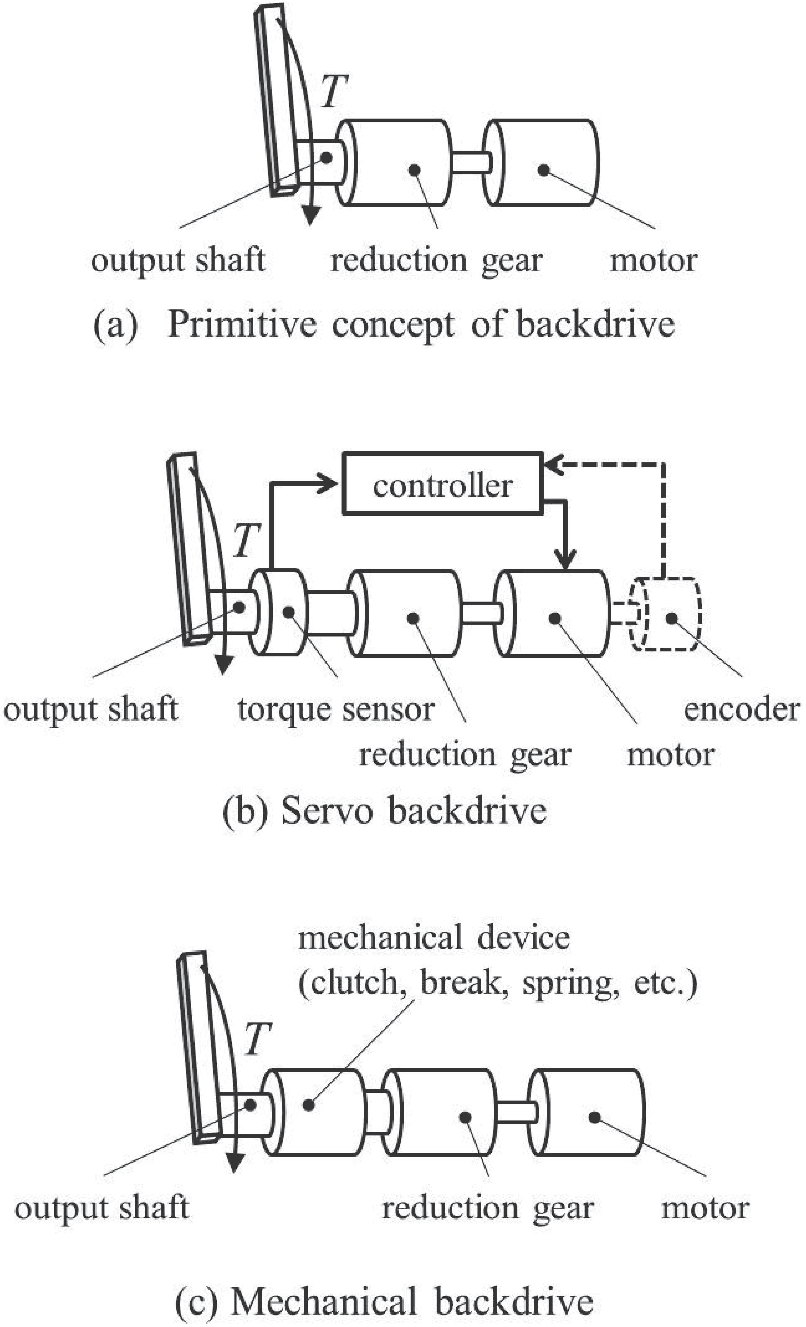
ロボットとアクチュエータのバックドライバビリティ ロボ學 Robogaku

公表特許公報

クーカ ロボター ゲーエムベーハー による特許

ロボット制御における特異点 エクサウィザーズ Engineer Blog
共同発表 遠隔操作性と繊細な作業性を備えた建設ロボットを開発 impactタフ ロボティクス チャレンジによる新しい災害対応重作業ロボットの開発
ガバナンスってなに コンプライアンス 全力支援 Htc ハイテクノロジーコミュニケーションズ

内部統制システム 組織統治 Csr 環境 エプソン
Workspace One ブログ コンディショナルアクセスとは 技術ブログ C S Engineer Voice

マニプレータ マニプレータ装置を持つ小室 B25j 1995年分 151件
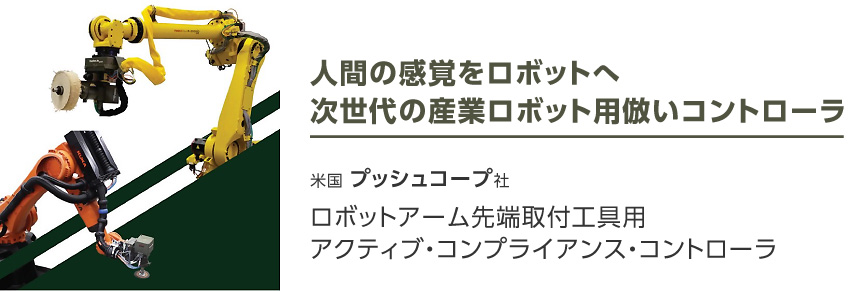
プッシュコープ社 ロボットアーム先端取付工具用アクティブ コンプライアンス コントローラ 愛知産業株式会社
セキュリティとコンプライアンス Box
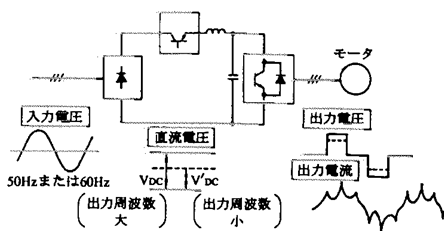
種類と特徴 インバータとは インバータ 製品 ソリューション 安川電機

外乱オブザーバの紹介 Qiita

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御
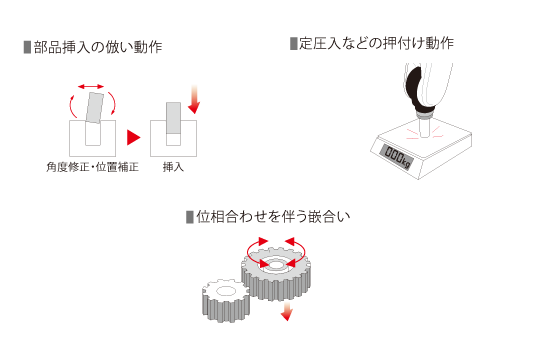
力センサ有コンプライアンス機能 ロボット機能 製品 産業用ロボット デンソーウェーブ
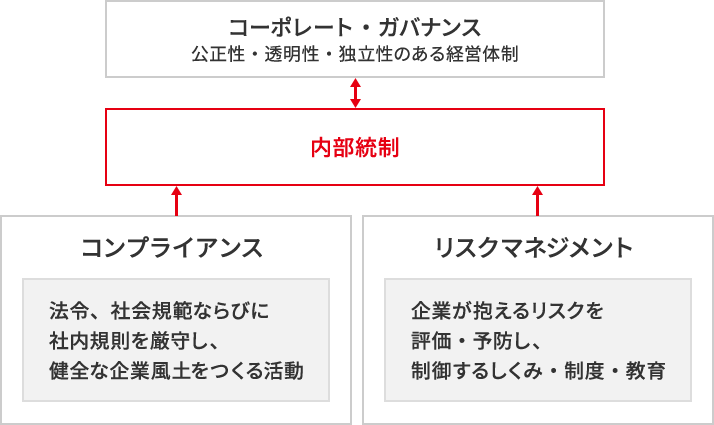
コンプライアンス リスクマネジメント 社会性報告 社会 環境 Csr 帝人株式会社

コンプライアンス制御ユニット Fill Ide Compressors デジタル タッチスクリーン式

ユニパルスの新製品 電動トルクアクチュエータ ゼロトルク制御 コンプライアンス制御デモ Youtube
Http Www Fha Sd Keio Ac Jp Jka17 17jka Report Final Pdf

産業用ロボットfシリーズ 三菱電機 株 Mitsubishi デジアナeカタログ メカトロネット

コンプライアンス制御の意味 用法を知る Astamuse

コンプライアンス 重点分野3 社会とともに発展する 環境 社会活動 Csr 小松製作所 建設機械のコマツ

Ms 900 Jpn日本語pdf問題質問18 コンプライアンスマネージャーを実装します 制御タスクのステータス情報を取得する必要があります どちらのオプションを使用できますか 回答するには 回答エリアで適切なオプションを選択します 注 それぞれの正しい選択には1

Robotec 電動トルクアクチュエータ
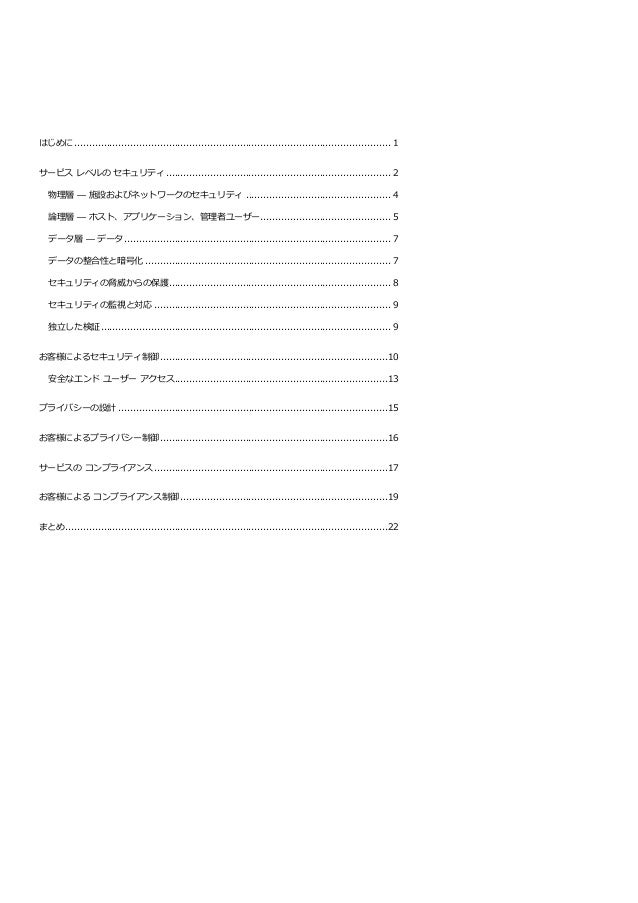
Office 365 セキュリティとコンプライアンス

臨界減衰条件を考慮した6自由度ロボットマニピュレータのインピーダンス制御
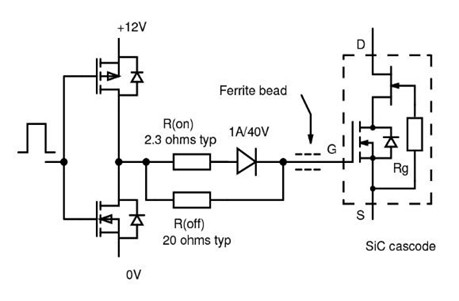
Sicスイッチの特性と設計上の注意点 2 2 Edn Japan

電流出力dacによる正確なトランスデューサ制御 Digikey

Robotec

1998 号 マニピュレータのコンプライアンス制御方式 Astamuse
Jfps 日本フルードパワーシステム学会

知能機械制御学研究室

コンプライアンス制御 Youtube
シャドーitを検知 制御するクラウドアクセス管理 Casb Netskope Nriセキュア
デンソーウェーブはエクサウィザーズの Corevery を採用し マルチモーダルai技術による コンプライアンス制御 フロー生成 模倣動作学習 を実現 年7月から販売予定 デンソーウェーブのプレスリリース



